

......
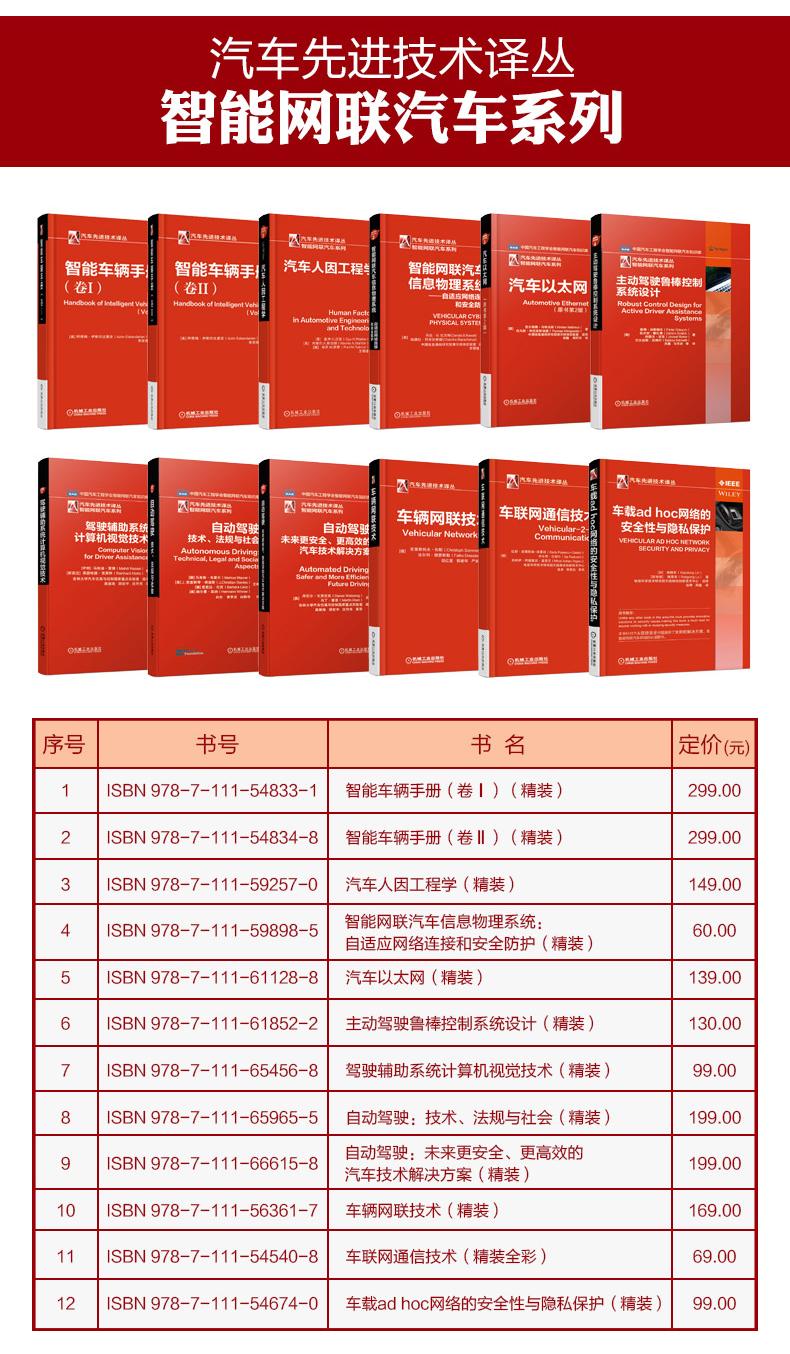
基本信息
序
前言
部分綜述
章自動駕駛簡介3
11簡介3
12自動駕駛級別3
13自動駕駛的構建模塊:關鍵
技術5
14實現自動駕駛:研究的挑戰7
141論證安全性、可靠性和
魯棒性9
142安全與隱私論述10
143功耗計算可靠度10
144人為因素(SAE
等級L3/4)10
145環境建模與感知11
146車輛控制與驅動11
147數字基礎設施12
15結論12
參考文獻13
第2章自動駕駛汽車的隱私和
安全14
21專業術語的介紹和定義14
22自動駕駛原則15
221技術原則15
222數據原則16
23當前的現狀16
24未來對自動駕駛的期望17
25建立社會信任18
26對行業的影響19
27下一步20
28結論21
第3章從技術標準的角度進行自動
駕駛22
31介紹22
32標準制定組織22
33不同標準的自動化水平23
34車輛系統和環境標準化24
341車輛相關標準24
342通信相關標準25
35自動化和未來標準化的路線圖29
參考文獻29第二部分自動駕駛控制的重要性
第4章高速公路自動駕駛控制
方案綜述33
41引言33
411問題陳述34
412軌跡生成35
413控制概念37
414劃分問題40
42模糊控制41
43線性狀態反饋控制42
44滑模控制42
45模型預測控制43
46其他概念44
47無人車輛的控制方案46
48控制方法的比較47
49展望49
參考文獻50
目錄●●●●●●●●●●自動駕駛——未來更安全、更的汽車技術解決方案第5章自動駕駛的路徑跟蹤:關于
控制系統規劃和正在進行的
研究的指導55
51引言62
52基于幾何和運動學關系的方法63
521純跟隨方法63
522斯坦利方法63
523基于車輛運動學的鏈式
控制器64
53基于常規反饋控制器和簡化車輛
動力學模型的方法66
531簡單反饋公式66
532線性二次型調節器74
54用于路徑跟蹤和注釋的其他
控制結構79
541滑模控制器79
542其他控制結構83
543綜述84
55路徑跟蹤控制的進展85
551用于極限轉彎的前饋和
反饋控制器85
552模型預測控制91
56結論104
參考文獻106
第6章車輛自主駕駛控制中車輛
參考車道的計算110
61引言110
62車輛車道保持邊界和要求111
63車輛駕駛狀況分析113
64基于模型的參考車道計算方法115
65功能體系結構概述119
66駕駛情況和模塊性能示例121
67結論122
參考文獻123第三部分環境感知、傳感器融合和感知的進展
第7章多傳感器環境感知在自動
駕駛中的作用127
71簡介127
72實踐狀況129
721動態環境129
722占用網格映射的靜態環境134
73數據融合的挑戰134
731傳感器表征134
732擴展對象136
733跟蹤初始化137
734異步傳感器和無序處理137
74實現工作流程和感知范例138
741感知軟件的設計范例138
742用于測試和驗證的軟件
環境140
75結論141
參考文獻142
第8章基于伽利略的駕駛輔助
系統:關鍵部件和開發143
81簡介143
82測試環境:Aldenhoven測試中心和
automotiveGATE143
83基于伽利略的傳感器融合144
831GNSS特性145
832傳感器融合145
833卡爾曼濾波器及擴展卡爾曼
濾波器146
834示例:簡單的2D案例147
835示例:3D案例149
84應用實例150
841應用1:協同自適應
巡航控制150
842兩輛車之間距離的確定150
843距離控制器的設計152
844實驗結果152
845應用2:碰撞避免系統153
85結論155
致謝155
參考文獻156
第9章駕駛輔助系統和自動駕駛
的數字地圖157
91簡介157
92基于本體的情境理解159
921本體159
922情境理解160
923基于本體的情境理解框架163
924實施和實驗評估169
925討論175
93地圖錯誤檢測176
931定義176
932問題177
933趨勢測試180
934討論187
94結論188
參考文獻189
0章車載雷達191
101簡介191
102前向雷達(FLR)193
103盲點探測雷達195
104早期系統和實驗結果198
105發展趨勢201
106未來方向202
參考文獻204第四部分 車載架構和可靠的電力計算
1章自動駕駛的系統架構和
安全要求207
111面向自動駕駛207
1111交通堵塞輔助208
1112高速公路輔助208
112系統結構208
1121環繞傳感器209
1122感知210
1123定位211
1124決策211
113功能安全的概念212
114技術安全的概念215
115自動駕駛功能對車載網絡的
要求215
1151電源要求215
1152通信網絡的要求216
116要求的意義216
117安全架構解決方案218
118結論219
參考文獻220
2章先進自動駕駛系統
設計222
121目的222
122的技術222
1221當前嵌入式系統設計
概述222
1222自動駕駛的硬件/軟件協同設
計面臨的挑戰:案例研究225
1223有效實現自動駕駛的
障礙227
123有效的未來自動駕駛的概念229
1231彌合異質性的性能差距229
1232縮小利用差距230
1233
......
本書的主要主題包括自動駕駛汽車的控制、認知數據處理、高性能計算、功能安全和驗證。這些主題被視為推動自動駕駛技術前進的基石。本書調研了自動駕駛汽車研究、開發和創新的*新動態,并闡述了重大新技術進步的行業驅動路線圖,以及支持自動駕駛發展的歐洲合作計劃。本書中給出的各種示例突出了自動駕駛的發展狀況以及前進的方向,適合工程學界的學者和研究人員、汽車及相關專業研究生、OEM和供應商的汽車工程師、ICT和軟件工程師、汽車技術管理人員及汽車企業決策人員閱讀使用。








......