

《AUTOSAR規范與車用控制器軟件開發》是一本系統學習AUTOSAR規范的參考用書。本書主要介紹了汽車嵌入式系統軟件規范AUTOSAR以及符合AUTOSAR規范的車用控制器軟件開發方法。本書共分10章,首先介紹了汽車電子控制系統以及AUTOSAR規范的基本概念;之后以AUTOSAR方法論為線索,通過示例開發過程介紹,地展現了基于AUTOSAR工具鏈完成符合AUTOSAR規范的車用控制器軟件開發的具體流程與方法;又剖析了AUTOSAR對道路車輛功能安全ISO26262標準的支持情況,并對AUTOSAR與信息安全以及Adaptive AUTOSAR平臺進行了介紹。本書在編寫過程中盡可能以通俗易懂的語言和形象的圖解來展現AUTOSAR中一些復雜的概念問題,精心設計的示例亦旨在以開發者的視角深度剖析AUTOSAR方法論的具體實施過程。
本書適合作為汽車電子相關專業高年級本科生和研究生的參考書,也可作為汽車電子行業軟件工程師學習參考的資料。
基本信息
章 汽車電子控制系統介紹1
1.1 電子技術在汽車上的應用/ 1
1.1.1 汽車電子技術的發展歷史 / 1
1.1.2 汽車電子技術的應用現狀 / 1
1.2 汽車電子控制系統的基本構成/ 3
1.3 車用控制器軟件標準(從OSEK 到AUTOSAR)/ 3
1.4 本章小結/ 4
第2章 AUTOSAR 規范基礎理論5
2.1 AUTOSAR 的由來與發展歷程/ 5
2.1.1 AUTOSAR 的由來 / 5
2.1.2 AUTOSAR 的原則及核心思想 / 6
2.1.3 AUTOSAR 的發展歷程及應用現狀 / 6
2.2 AUTOSAR 分層架構/ 7
2.2.1 AUTOSAR 應用軟件層 / 8
2.2.2 AUTOSAR 運行時環境 / 8
2.2.3 AUTOSAR 基礎軟件層 / 8
2.3 AUTOSAR 軟件組件/ 9
2.3.1 軟件組件的數據類型 / 10
2.3.2 軟件組件的端口與端口接口 / 11
2.3.3 軟件組件的內部行為 / 12
2.4 AUTOSAR 虛擬功能總線/ 14
2.5 AUTOSAR 方法論/ 15
2.6 AUTOSAR 應用接口/ 16
2.7 本章小結/ 17
第3章 本書示例及AUTOSAR系統解決方案介紹18
3.1 本書示例介紹/ 18
3.1.1 示例開發需求介紹 / 18
3.1.2 示例總體方案設計 / 18
3.1.3 示例系統設計 / 18
3.1.4 示例系統AUTOSAR 架構 / 21
3.2 ETAS AUTOSAR 系統解決方案介紹/ 23
3.3 本書AUTOSAR 系統解決方案介紹/ 23
3.4 本章小結/ 24
第4章 AUTOSAR 軟件組件級設計與開發25
4.1 Matlab/Simulink 與Embedded Coder工具簡介/ 25
4.1.1 Matlab/Simulink 工具簡介 / 25
4.1.2 Embedded Coder 工具簡介 / 25
4.2 基于Matlab/Simulink 的軟件組件開發/ 26
4.2.1 Matlab/Simulink 與AUTOSAR 基本概念的對應關系 / 26
4.2.2 軟件組件內部行為建模方法 / 27
4.2.3 AUTOSAR 客戶端/服務器機制的實現方法 / 27
4.3 軟件組件代碼及描述文件配置生成/ 29
4.3.1 求解器及代碼生成相關屬性配置 / 29
4.3.2 模型配置 / 31
4.3.3 AUTOSAR Properties 配置 / 33
4.3.4 Simulink-AUTOSARMapping 配置 / 36
4.3.5 符合AUTOSAR 規范的代碼及描述文件生成 / 38
4.4 在Simulink 中導入軟件組件描述文件——“自上而下”的工作流程/ 39
4.5 本章小結/ 40
第5章 AUTOSAR 系統級設計與配置41
5.1 ETAS ISOLAR-A 工具簡介/ 41
5.2 ETAS ISOLAR-A 工具入門/ 42
5.2.1 ISOLAR-A 安裝方法 / 42
5.2.2 ISOLAR-A 界面說明 / 46
5.3 基于ISOLAR-A 的軟件組件設計方法/ 47
5.3.1 AUTOSAR 工程創建 / 47
5.3.2 數據類型定義 / 49
5.3.3 端口接口設計 / 52
5.3.4 軟件組件設計 / 55
5.3.5 I/O 硬件抽象層軟件組件設計 / 67
5.3.6 軟件組件模板生成 / 70
5.4 基于ISOLAR-A 的系統級設計與配置方法/ 73
5.4.1 系統配置輸入文件創建與導入 / 73
5.4.2 Composition SWC 建立 / 79
5.4.3 系統配置 / 83
5.4.4 ECU 信息抽取 / 86
5.5 本章小結/ 87
第6章 AUTOSAR ECU 級開發之RTE 與BSW(除MCAL 外)88
6.1 ETAS RTA 系列工具簡介/ 88
6.1.1 RTA-BSW 簡介 / 88
6.1.2 RTA-RTE 簡介 / 89
6.1.3 RTA-OS 簡介 / 89
6.2 ETAS RTA 系列工具入門/ 89
6.2.1 RTA 系列工具安裝方法 / 89
6.2.2 RTA 系列工具界面說明 / 95
6.3 CAN 通信協議棧概念與配置方法介紹/ 96
6.3.1 CAN 通信協議棧概念 / 96
6.3.2 CAN 通信協議棧配置方法 / 96
6.4 EcuM 模塊概念與配置方法介紹/ 105
6.5 BswM 模塊概念與配置方法介紹/ 110
6.6 BSW 模塊代碼生成/ 116
6.7 服務軟件組件與應用層軟件組件端口連接/ 118
6.8 RTE 配置與代碼生成/ 119
6.8.1 RTE Contract 階段生成 / 119
6.8.2 RTE 配置 / 120
6.8.3 RTE Generation 階段生成 / 124
6.9 AUTOSAR 操作系統概念與配置方法介紹/ 127
6.9.1 AUTOSAR 操作系統概念 / 127
6.9.2 RTA-OS 工程創建 / 131
6.9.3 AUTOSAR 操作系統配置方法 / 132
6.9.4 RTA-OS 工程編譯 / 136
6.10 本章小結/ 137
第7章 AUTOSAR ECU 級開發之MCAL138
7.1 MCAL 配置工具入門/ 138
7.1.1 MCAL 配置工具安裝方法 / 138
7.1.2 MCAL 配置工具界面說明 / 139
7.1.3 MCAL 配置工程創建方法 / 140
7.2 MCAL 模塊配置方法及常用接口函數介紹/ 142
7.2.1 Mcu 模塊 / 142
7.2.2 Gpt 模塊 / 148
7.2.3 Port 模塊 / 151
7.2.4 Dio 模塊 / 154
7.2.5 Adc 模塊 / 157
7.2.6 Pwm 模塊 / 163
7.2.7 Icu 模塊 / 168
7.2.8 Can 模塊 / 171
7.2.9 Base 與Resource 模塊 / 176
7.3 MCAL 配置驗證與代碼生成/ 176
7.4 本章小結/ 177
第8章 AUTOSAR 工程代碼集成與調試178
8.1 AUTOSAR 工程代碼架構與集成方法介紹/ 178
8.2 代碼編譯鏈接/ 178
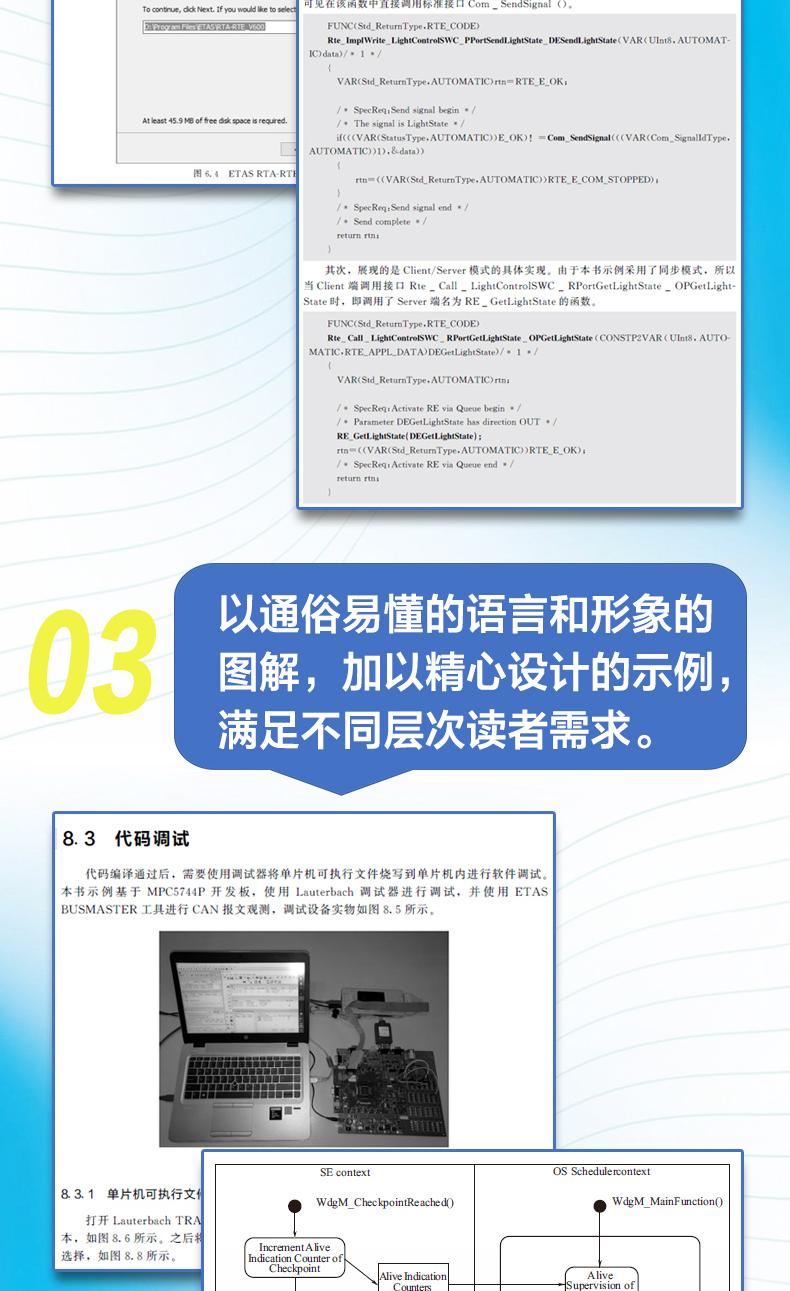
8.3 代碼調試/ 179
8.3.1 單片機可執行文件下載 / 179
8.3.2 A 型車燈調試現象 / 180
8.3.3 B 型車燈調試現象 / 183
8.4 本章小結/ 184
第9章 AUTOSAR 與功能安全185
9.1 AUTOSAR 對ISO 26262 中支持部分的要求概述/ 185
9.1.1 ISO 26262 對架構設計的要求 / 186
9.1.2 ISO 26262 對硬件驗證的要求 / 188
9.1.3 ISO 26262 對通信驗證的要求 / 190
9.1.4 ISO 26262 對FFI 的要求 / 191
9.1.5 ISO 26262 對編碼風格的要求 / 192
9.2 AUTOSAR 中實現FFI 的安全機制/ 194
9.2.1 AUTOSAR 安全機制的存儲空間分區 / 194
9.2.2 AUTOSAR 安全機制的存儲空間保護 / 194
9.2.3 AUTOSAR 安全機制的程序流監控 / 196
9.2.4 AUTOSAR 安全機制的E2E 保護 / 202
9.3 本章小結/ 206
0章 AUTOSAR 技術展望207
10.1 AUTOSAR 與信息安全/ 207
10.1.1 密碼協議棧 / 209
10.1.2 安全車載通信 / 212
10.2 Adaptive AUTOSAR 平臺/ 216
10.2.1 Adaptive AUTOSAR 緣起 / 216
10.2.2 AP 和CP / 218
10.2.3 Adaptive AUTOSAR 平臺新概念介紹 / 220
10.3 本章小結/ 224
參考文獻225
......
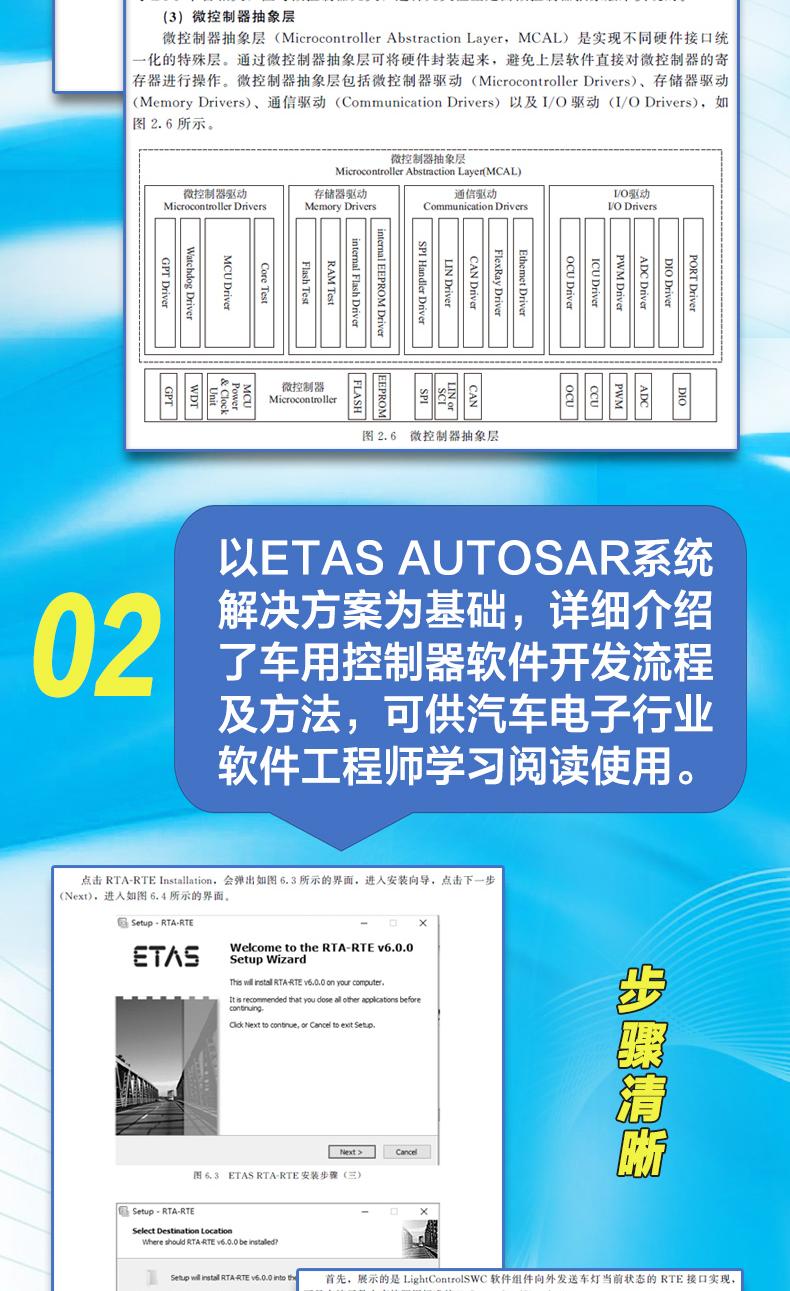
本書共分10章,首先介紹了汽車電子控制系統以及AUTOSAR 規范的基本概念;之后以AUTOSAR方法論為線索,通過示例開發過程介紹,展現了基于AUTOSAR工具鏈完成符合AUTOSAR規范的車用控制器軟件開發的具體流程與方法;*后,剖析了AUTOSAR對道路車輛功能安全ISO 26262標準的支持情況,并對AUTOSAR 與信息安全以及Adaptive AUTOSAR平臺進行了介紹。本書以通俗易懂的語言和形象的圖解展現了AUTOSAR中一些復雜的概念問題,精心設計的示例亦旨在以開發者的視角深度剖析AUTOSAR方法論的具體實施過程。本書可作為汽車電子相關專業高年級本科生和研究生的參考書,也可作為汽車電子行業軟件工程師學習參考的資料。



宋珂,同濟大學汽車學院,碩導,副教授,同濟大學汽車學院車輛工程專業博士,德國卡爾斯魯厄理工學院聯合培養博士。主要研究領域包括:燃料電池汽車動力系統建模及仿真方法,燃料電池汽車動力系統匹配設計流程及方法,燃料電池汽車動力系統整車能量管理控制策略,電/電混合電動汽車動力系統混合度優化設計理論及方法,基于AUTOSAR、ISO26262標準的電動汽車動力系統控制技術。近三年以第 一作者發表燃料電池汽車相關學術論文20余篇,SCI/EI檢索5篇,以第 一、第 二作者申請發明專利7項(已獲權4項),實用新型專利1項,軟件著作權登記5項。